
Milan Groshev
Postdoctoral Fellow
IE University
I am a Postdoctoral Fellow in the The Cyber-Physical Life (CyPhy Life) Research Group , led by Eduardo Castelló Ferrer. My main responsibility is leading the ROBOPRENEUR research line,which explores how robotics and blockchain technologies can be combined to create autonomous, secure and explanable robotic systems capable of full economic independency. These robots are designed to complete tasks, receive compensation, and reinvest earnings toward their own sustainability. This research focuses on new forms of human-robot interaction, where robots are not only seen as tools but also as participants in economic systems. We investigate whether blockchain can serve as a foundation for physical artificial intelligence. In addition, I oversee the research activities within our lab, co-supervising the work of our team members. I am also actively involved in writing project proposals and securing funding to support ongoing and future research efforts in the lab.
Until recently i was part of the Inovation Hub of Laude Technology, leading a team of reaserchers and working on R&D projects with Universities, Research Institutes and Industry. We research and apply advanced algorithms (AI, Machine Learning, optimization) to solve technological challenges of our clients. As part of my daily activities i lead national and European R&D projects, participate in obtaining financing for technological research projects and contribute to the development of high-impact scientific papers in the field of telecommunications and robotics.
In the past, i worked as Research Scientist at the Telematic engineering department in UC3M on the NETCOM Research Group where i did my PhD and 2 years of postdoc with Antonio de la Oliva and Carlos J. Bernardos.
My interests broadly span machine learning, communication systems and robotics. In the past I worked on 5G-enabled network robots, semantic orchestration, ML assisted robot remote control, DLT federation for networked robotics and network sensing for SLAM. I particularly enjoy building real prototypes and carrying out experimental performance evaluations of networked-robotics and communication systems.
Education
University Carlos III of Madrid
Ph.D. in Telematics Engineering
Advisor: Prof. Antonio de la Oliva
Politecnico di Torino
M.S. in Telematics Engineering
Thesis: Evaluating the performance of OpenFlow controllers
Ss. Cyril & Methodius University of Skopje
B.S. in Telecommunications
Experience
Postdoctoral Fellow — IE University
Advisor: Eduardo Castelló Ferrer
Design and development of Decentralized Autonomous Robotic Organizations, where robots can interact with humans and AI agents in a secure, transparent, and explainable manner. The main focus is on integrating robotic systems with blockchain technologies and cryptographic techniques. Responsibilities include contributing to funding acquisition for research projects and supporting the development of high-impact scientific papers in the fields of blockchain and robotics.
Senior Reasercher — Laude Technology
Manager: Ricardo Silva
Developed novel solutions and algorithms to help Laude Technology clients overcome their technological challenges. Main focus on the Telecommunications sector and the O-RAN adaptation. Leading national and European R&D projects. Participating in obtaining financing for technological research projects and contribute to the development of high-impact scientific papers in the field of telecommunications and robotics.
Postdoctoral Reasercher — UC3M
Advisor: Antonio de la Oliva and Carlos J. Bernardos
Worked on semantic orchestration in O-RAN, improving robot SLAM with network sensing, GNNs for network slicing and DLT federation.
PhD candidate — UC3M
Manager: Antonio de la Oliva
Worked on predictive robot remote control over Wi-Fi and virtualized and distributed robotic systems.
Projects
ROBOPRENEUR.
This project focuses on how robots can act as autonomous economic agents, capable of making decisions, negotiating, and executing contracts using blockchain technology. The goal is to enable robots to participate in digital economies, facilitating secure, decentralized transactions and collaborations without human intervention.
DESIRE6G: Deep Programmability and Secure Distributed Intelligence for Real-Time End-to-End 6G Networks
DESIRE6G will design and develop a novel zero-touch control, management, and orchestration platform, with native integration of AI, to support eXtreme URLLC application requirements over a performant, measurable and programable data plane.
Hexa-X: A EU flagship for 6G vision and intelligent fabric of technology enablers connecting human, physical, and digital worlds
The Hexa-X project represents EU 6G flagship vision through the development of key technology enablers in the areas of new radio access technologies, connected intelligence through AI-driven air interface and 6G architectural enablers for network disaggregation and dynamic dependability..
5G-DIVE: eDge Intelligence for Vertical Experimentation
5G-DIVE targets end-to-end 5G trials aimed at proving the technical merits and business value proposition of 5G technologies in two vertical pilots, namely (i) Industry 4.0 and (ii) Autonomous Drone Scout. These trials will put in action a bespoke end-to-end 5G design tailored to the requirements of the applications targeted in each vertical pilot, such as digital twinning and drone fleet navigation applications.

5G Coral: A 5G Convergent Virtualised Radio Access Network Living at the Edge
5G-CORAL project leverages on the pervasiveness of edge and fog computing in the Radio Access Network (RAN) to create a unique opportunity for access convergence. This is envisioned by the means of an integrated and virtualised networking and computing solution where virtualised functions, context-aware services, and user and third-party applications are blended together to offer enhanced connectivity and better quality of experience. The proposed solution contemplates two major building blocks, namely (i) the Edge and Fog computing System (EFS) subsuming all the edge and fog computing substrate offered as a shared hosting environment for virtualised functions, services, and applications; and (ii) the Orchestration and Control System (OCS) responsible for managing and controlling the EFS, including its interworking with other (non-EFS) domains.
Portfolio

FoReCo: a forecast-based recovery mechanism for real-time remote control of robotic manipulators
A framework for implementation and testing of predictive remote control mechanisms for robot manipulators.

Robot Manipulator Digital Twin as a network service
A digital twin of robot manipulator implemented as a virtualized network service.

Mobile robot autonomus navigaton as a network service
A framework for autonomus navigation of mobile robot using the ros navigation stack and implemented as network service.

Virtual access point migration using 802.11 r
A framework for virtual AP handover network based on hostapd with 802.11r to allow fast transition (FT) clients.
Publications
Under minor revision in IEEE Network 2025
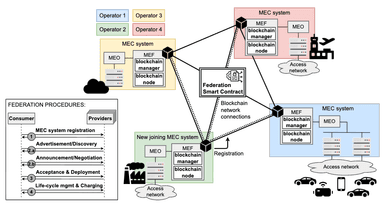
Blockchain-Driven Federation for Distributed Edge Systems: Design and Experimental Validation
Zahir, A., Groshev, M., Bernardos, J.C., & de La Oliva,A.
A novel novel solution using blockchain and smart contracts to enable distributed MEC systems to dynamically negotiate and execute federation in dynamic enviorments.
Under major revision in IEEE Internet of Things Journal 2025
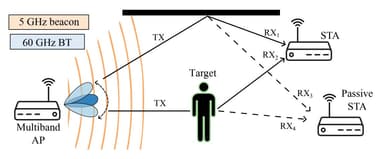
802.11bf Multiband Passive Sensing: Reusing Wi-Fi Signaling for Sensing
Pablo Picazo-Martinez, Carlos Barroso-Fernández, Alejandro Calvillo-Fernandez, Milan Groshev, Carlos J. Bernardos, Antonio de la Oliva, Alain Mourad
A novel multiband passive sensing system that leverages IEEE 802.11bf Wi-Fi signals for environmental sensing, focusing on both sub-7 GHz and millimeter-wave (mmWave) bands.

IEEE Vehicular Technology Magazine 2025
Graph Neural Networks for O-RAN Mobility Management: A Link Prediction Approach
Ana Gonzalez Bermudez, Miquel Farreras, Milan Groshev, José Antonio Trujillo, Isabel de la Bandera, Raquel Barco
A proactive handover optimization framework for mobility management in O-RAN, leveraging user-cell link predictions to identify the optimal target cell.

IEEE Network 2025
Attention to Virtualization: Making Network Digital Twins aware of Network Slicing
Alejandro Calvillo-Fernandez, Toni Dimitrovski, Milan Groshev, Aditya Ganesh, Constantine Ayimba, and Antonio de la Oliva
GAT-based Network Digital Twin solution that takes into considiration the impact of virtualization on shared physical infrastructure while addressing performance problems of existing GNN-based solutions.

The Institution Of Engineering and Technology (IET) 2024
Digital Twins for 6G Fundamental theory, technology and applications
Groshev, M., Guimarães, C. & de la Oliva, A.
Chapter in the book dedicated to the Robotics digital twin for 6G.

ICDCN 2023
Performance evaluation of Private and Public Blockchains for multi-cloud service federation
Zahir, A., Groshev, M., Antevski, K., Bernardos, J.C., Ayimba, C. & de La Oliva,A.
Comparing the performance of blockchain-based federation in private and public blockchain networks and their integration with a production-ready orchestration solution.

IEEE Communications Magazine 2023
IEEE 802.11 az Indoor Positioning with mmWave
Picazo, P., Barroso-Fernandez, C., Pérez, J.M., Groshev, M. & de La Oliva, A.
Analysis on the new techniques provided by IEEE 802.11az for enhanced secured positioning in the mmWave band, assessing them through experimentation.

VTC2023-Fall 2023
waveSLAM: Empowering Accurate Indoor Mapping Using Off-the-Shelf Millimeter-wave Self-sensing
Picazo, P., Groshev, M., Blanco, A., Fiandrino, C., de La Oliva, A. & Widmer, J.
A low-cost mobile robot system that uses the millimetre wave (mmWave) communication devices to enhance the indoor mapping process targeting environments with reduced visibility or glass/mirror walls.

Digital Communications and Networks 2023
Edge robotics: are we ready? an experimental evaluation of current vision and future directions
Milan Groshev, Gabriele Baldoni, Luca Cominardi, Antonio de la Oliva, Robert Gazda
Edge robotics systems that leverages a wide range of Information Technologies (IT) to offer tangible benefits like cost reduction, powerful computational capabilities and data offloading.

SIGCOMM 2022
🏆 Best Demo Award
FoReCo: a forecast-based recovery mechanism for real-time remote control of robotic manipulators
Milan Groshev, Javier Sacido, Jorge Martín-Pérez
The demonstration shows how FoReCo recovers the lost commands, and how the robot arm operates smoothly despite the losses that are present in the wireless medium.

IEEE/ACM Transactions on Networking 2021
KPI Guarantees in Network Slicing
Pérez, J.M., Malandrino F., Chiasserini F.C., Groshev, M. & Bernardos J.C.
Novel methodology and resource orchestration scheme, named OKpi, which provides high-quality decisions on VNF (Virtual Network Function) placement and data routing, including the selection of radio points of attachment.

IEEE Communications Magazine 2021
Towards Intelligent Cyber-Physical Systems: Digital Twin meets Artificial Intelligence
Groshev, M., Guimarães, C., Pérez, J.M. & de la Oliva, A.
The role of AI as integratior of the compute and network domains in industrial digital twins by analyzing a set of AI agents at the application and infrastructure levels.

IEEE NFV-SDN 2020
DLT federation for Edge robotics
Antevski, K., Groshev, M., Baldoni, G. & Bernardos, C.
A solution that enables Edge robotics service to expand its service footprint or access coverage over multiple administrative domains with the application of Distributed ledger technologies (DLTs) for the federation procedures.

IEEE Globecom Workshop 2020
An Intelligent Edge-based Digital Twin for Robotics
Luigi, G., Groshev, M., Guimarães, C., Bernardos, C. & de la Oliva, A.
A solution for an Edge-based Digital Twin for robotics, which leverages on the cloud-to-things continuum to offload computation and intelligence from the robots to the network.

IEEE CoNEXT Workshop 2018
Enhancing Edge robotics through the use of context information
Antevski, K., Groshev, M., Cominardi, L., Bernardos, C. J., Mourad, A., & Gazda, R.
Experimentation of the first ETSI MEC Edge Robotics use cases where we show the benefits of residing at the Edge for robotics applications, due to the possibility of consuming network context information.